|
Yufei Zhu I am a doctoral student at the Robot Navigation & Perception Lab, Örebro University in Sweden, under the supervision of Martin Magnusson, with co-supervision by Andrey Rudenko, Tomasz P. Kucner, and Achim J. Lilienthal. I am working on the EU horizon 2020 project DARKO and affiliated with Wallenberg AI, Autonomous Systems and Software Program (WASP). My research is part of DARKO EU project, which aims to develop agile production robots that are efficient, safe and able to operate in work environments shared with humans. A significant aspect of this environment is the need for robots to be cognizant of human presence and intentions, allowing for smooth and intuitive interactions. To achieve this, the focus is on learning probabilistic representations of human motion patterns, i.e. maps of dynamics (MoDs). By encoding spatio or spatio-temporal patterns of human motion as environmental features, the learned MoDs can be exploited to infer goal locations, constraints, and preferences implicitly, which is crucial for multimodal long-term human motion prediction. Efforts are also directed toward enhancing the efficiency and flexibility of learning these patterns, including online updates with new observations. Before starting my doctoral studies, I worked as a software engineer at Klarna AB and Ericsson AB in Stockholm, Sweden. Github / Google Scholar / LinkedIn / Email |

|
News |
|

|
|
|
|

|
|

|
|

|
Research |
|
LaCE-LHMP: Airflow Modelling-Inspired Long-Term Human Motion Prediction By Enhancing Laminar Characteristics in Human Flow
Yufei Zhu, Han Fan, Andrey Rudenko, Martin Magnusson, Erik Schaffernicht, Achim J Lilienthal ICRA 2024 One sentence description Keywords: |
|
CLiFF-LHMP: Using Spatial Dynamics Patterns for Long-Term Human Motion Prediction
Yufei Zhu, Andrey Rudenko, Tomasz P Kucner, Luigi Palmieri, Kai O Arras, Achim J Lilienthal, Martin Magnusson IROS 2023 One sentence description Keywords: |
|
A Data-Efficient Approach for Long-Term Human Motion Prediction Using Maps of Dynamics
Yufei Zhu, Andrey Rudenko, Tomasz P Kucner, Achim J Lilienthal, Martin Magnusson ICRA 2023 Workshop on 5th LHMP One sentence description Keywords: |
|
TH\" OR-MAGNI: A Large-scale Indoor Motion Capture Recording of Human Movement and Robot Interaction
Tim Schreiter, Tiago Rodrigues de Almeida, Yufei Zhu, Eduardo Gutierrez Maestro, Lucas Morillo-Mendez, Andrey Rudenko, Luigi Palmieri, Tomasz P Kucner, Martin Magnusson, Achim J Lilienthal arXiv One sentence description Keywords: |
|
|
THOR-Magni: Comparative Analysis of Deep Learning Models for Role-Conditioned Human Motion Prediction
Tiago Rodrigues De Almeida, Andrey Rudenko, Tim Schreiter, Yufei Zhu, Eduardo Gutierrez Maestro, Lucas Morillo-Mendez, Tomasz P Kucner, Oscar Martinez Mozos, Martin Magnusson, Luigi Palmieri, Kai O Arras, Achim J Lilienthal ICCV 2023 Workshop One sentence description Keywords: |
|
|
The magni human motion dataset: Accurate, complex, multi-modal, natural, semantically-rich and contextualized
Tim Schreiter, Tiago Rodrigues de Almeida, Yufei Zhu, Eduardo Gutierrez Maestro, Lucas Morillo-Mendez, Andrey Rudenko, Tomasz P Kucner, Oscar Martinez Mozos, Martin Magnusson, Luigi Palmieri, Kai O Arras, Achim J Lilienthal RO-MAN 2022 Workshop on SIRRW One sentence description Keywords: |
Project |

|
Dynamic Agile Production Robots that Learn and Optimise Knowledge and Operations
DARKO EU Project Örebro University, TUM, Bosch, University of Pisa, EPFL, University of Lincoln, ACT Operations Research DARKO is innovating agile production robots for efficient and safe intralogistics in warehouses. |
|
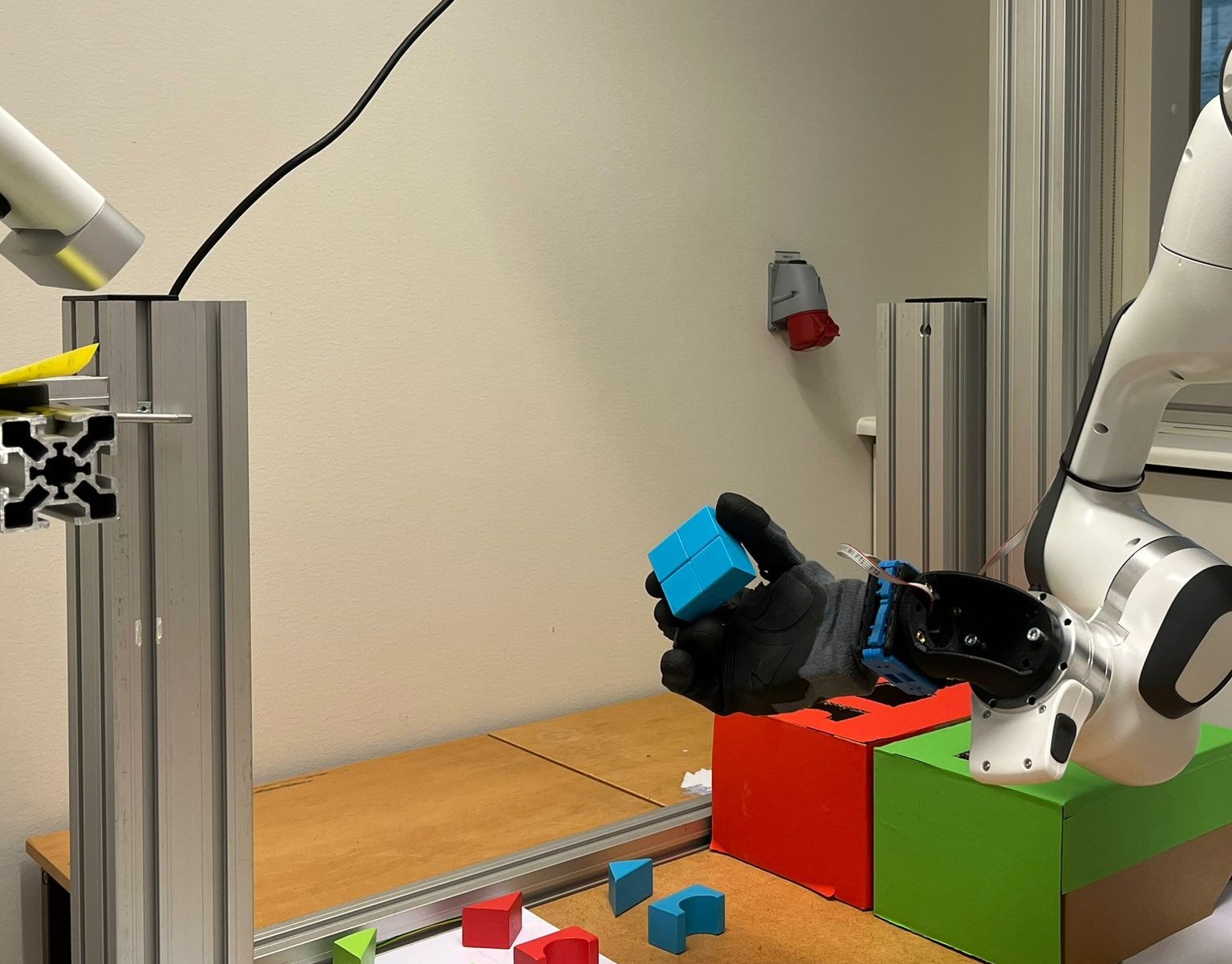
Object Picking and Constrained Placement by Visual Reasoning
Yufei Zhu, Shih-Min Yang, Rishi Hazra, Kamran Hosseini, Karol Wojtulewicz We designed a robotic system for precise object manipulation, integrating a perception module, visual reasoning module, and an in-hand perception and control module. |
|
From Website Source |